Publications
2023
-
 Learning Sampling Dictionaries for Efficient and Generalizable Robot Motion Planning with Transformers2023
Learning Sampling Dictionaries for Efficient and Generalizable Robot Motion Planning with Transformers2023 -
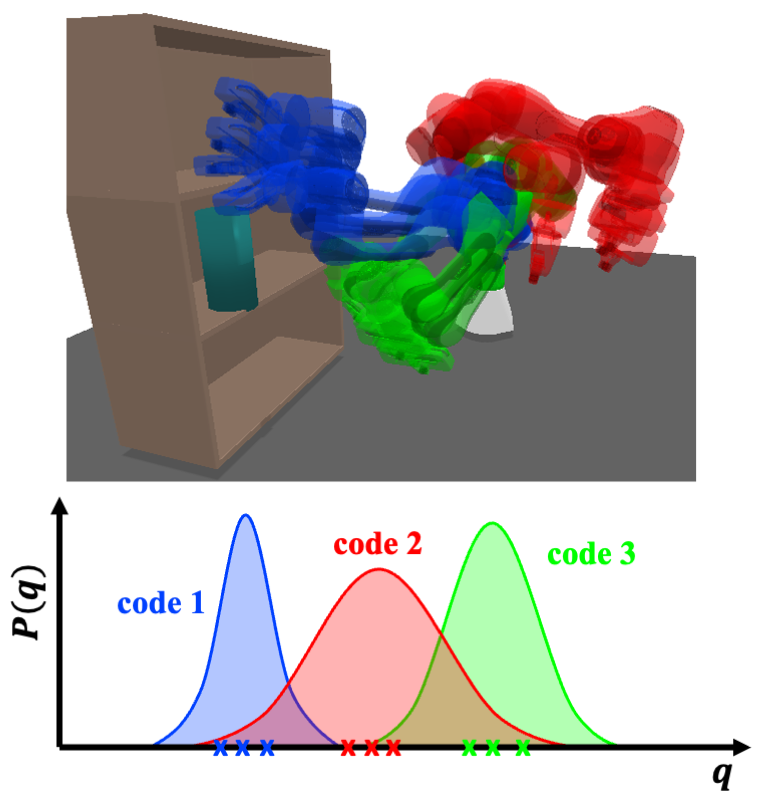
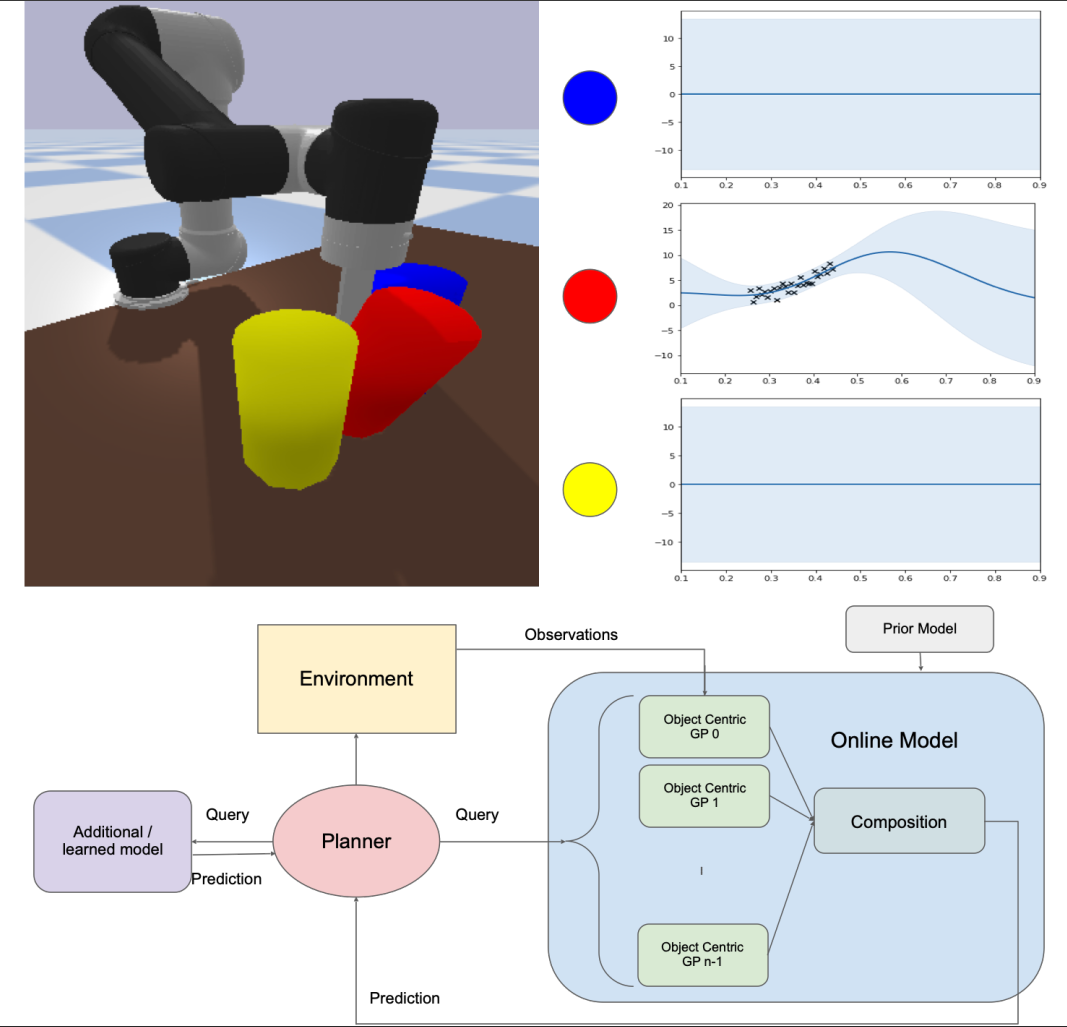 Object-centric Representations for Interactive Online Learning with Non-Parametric MethodsIn International Conference on Automation Science and Engineering (CASE), 2023
Object-centric Representations for Interactive Online Learning with Non-Parametric MethodsIn International Conference on Automation Science and Engineering (CASE), 2023 -
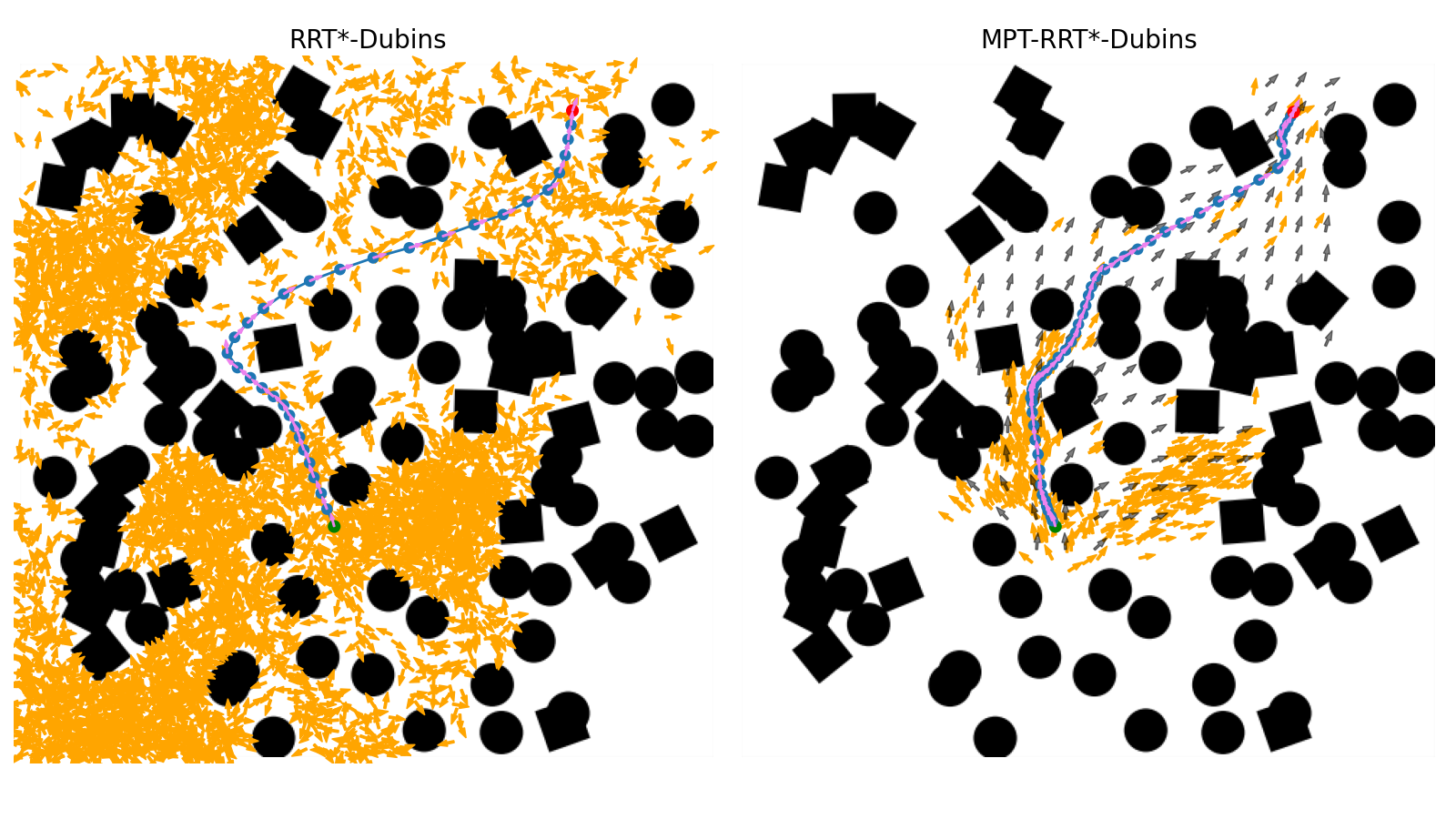
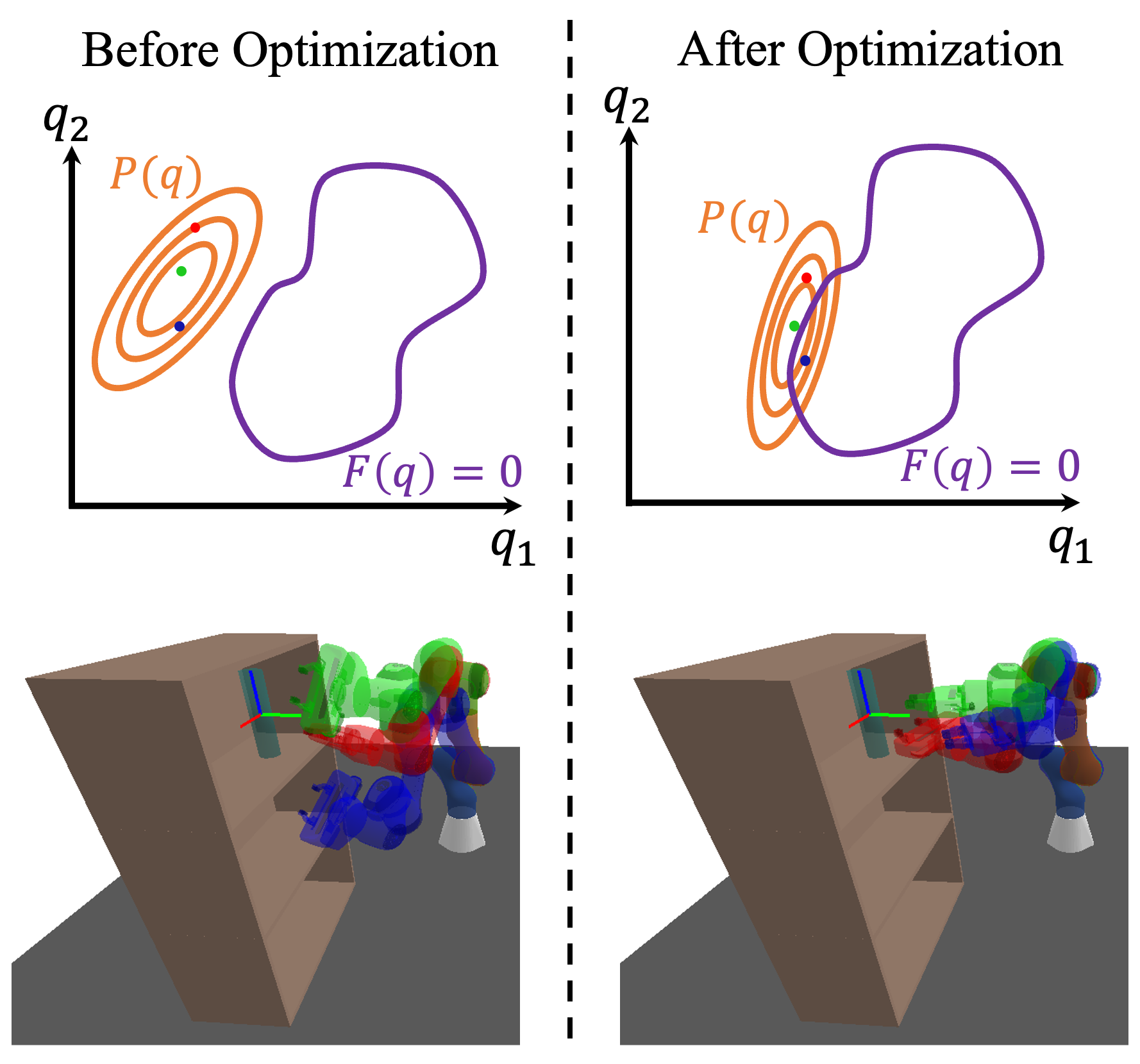 Zero-Shot Constrained Motion Planning Transformers Using Learned Sampling Dictionaries2023
Zero-Shot Constrained Motion Planning Transformers Using Learned Sampling Dictionaries2023
2022
-
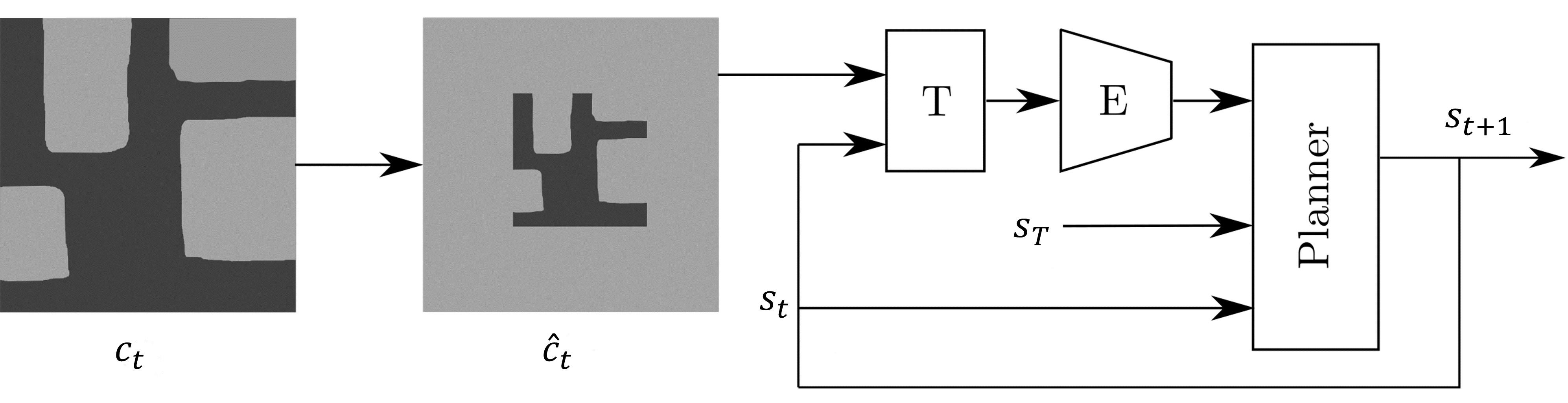
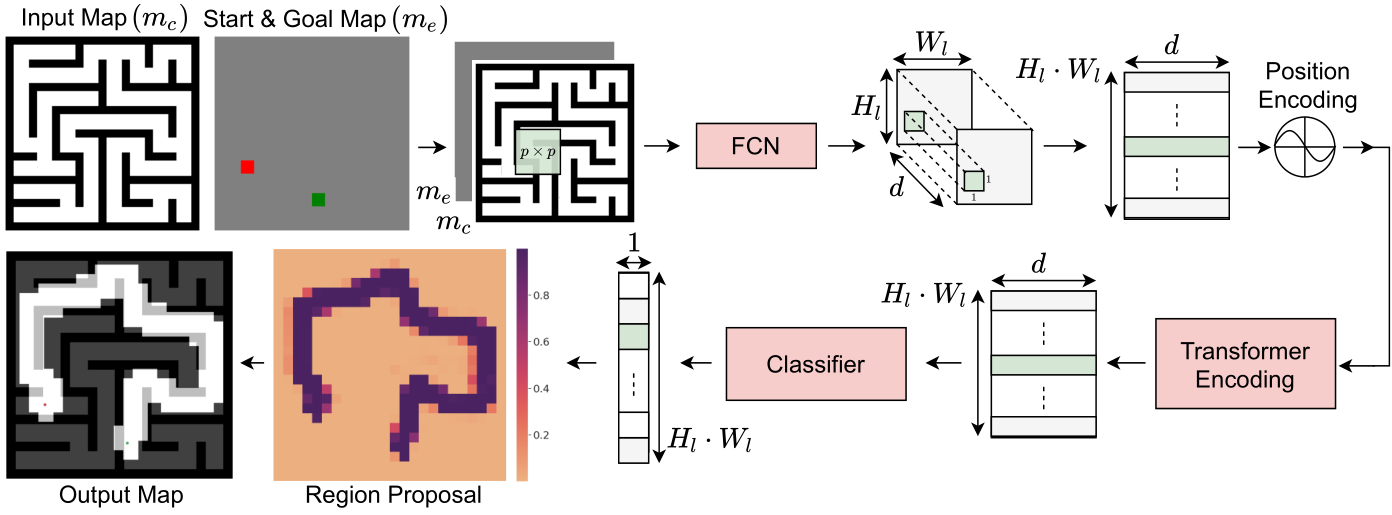 Motion Planning Transformers: One Model to Plan them All2022
Motion Planning Transformers: One Model to Plan them All2022 -
 Motion Planning Transformers: A Motion Planning Framework for Mobile Robots2022
Motion Planning Transformers: A Motion Planning Framework for Mobile Robots2022
2021
-
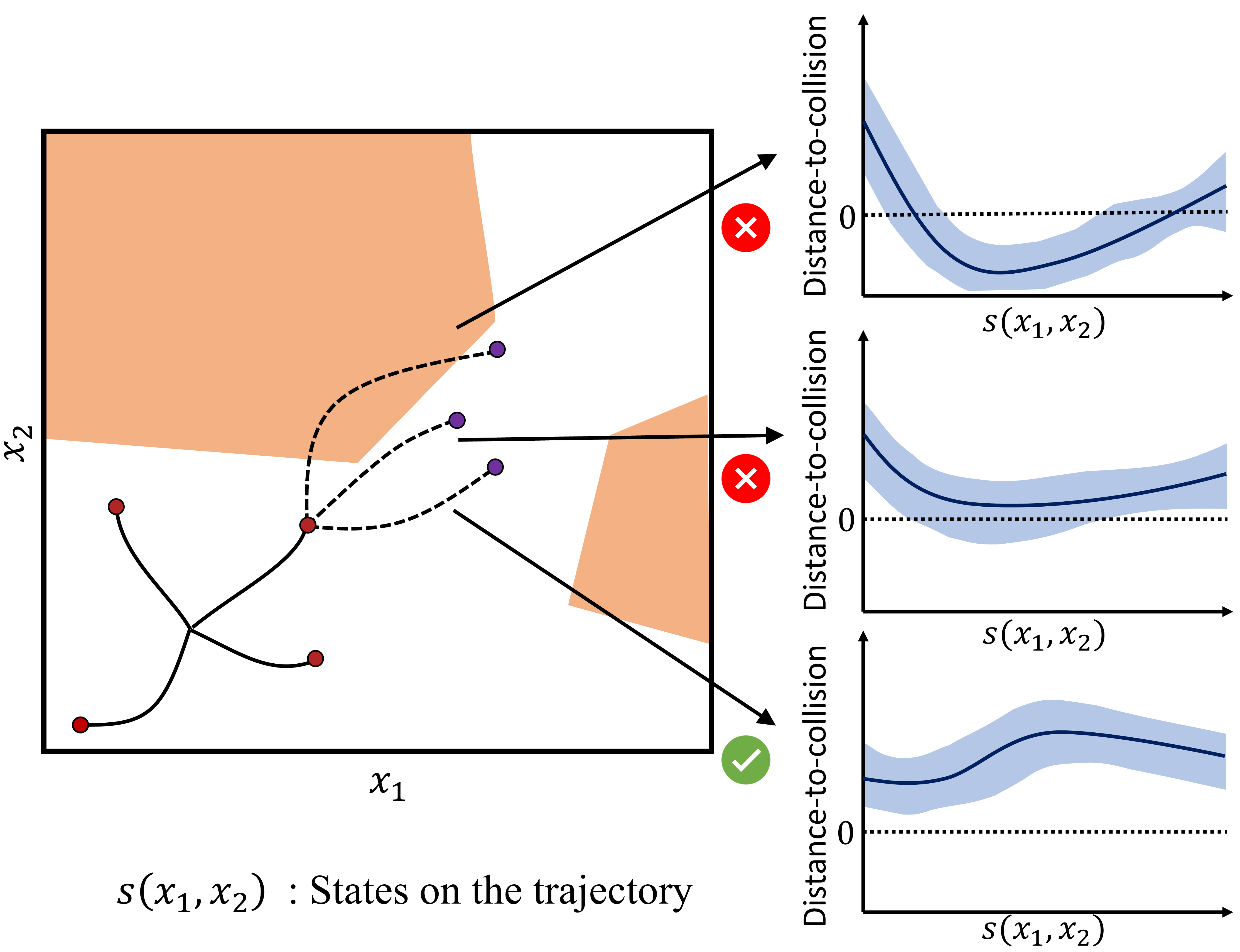 Chance-Constrained Motion Planning using Modeled Distance-to-Collision Functions2021
Chance-Constrained Motion Planning using Modeled Distance-to-Collision Functions2021
2020
-
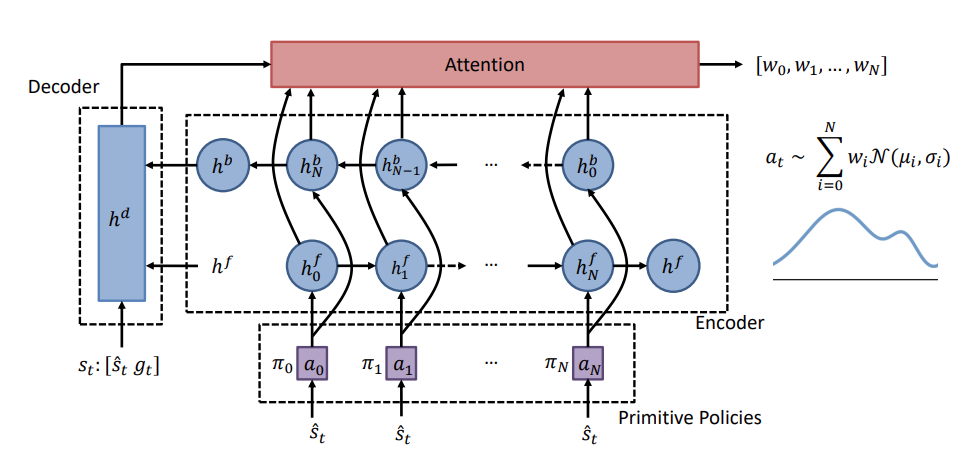
 Dynamically Constrained Motion Planning Networks for Non-Holonomic RobotsIn 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2020
Dynamically Constrained Motion Planning Networks for Non-Holonomic RobotsIn 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2020
2019
2017
- Nonmotor regions encode path-related information during movementsIn 2017 39th Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC), 2017
- The role of nonmotor brain regions during human motor controlIn 2017 39th Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC), 2017